传统伺服电机连接图
九游AG服务一体化伺服电机连接示意图
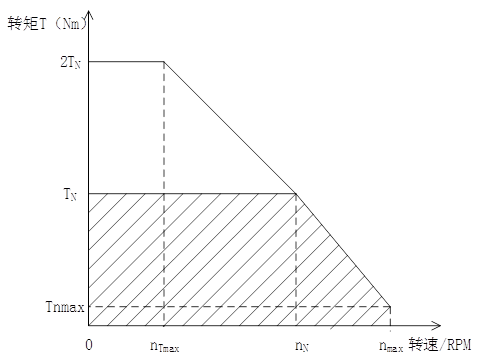
1. 模块化高集成度设计,快速布置现场和安装,省去驱动器和电机之间匹配过程,降低了现场总线的成本,减少了使用成本。 常见名词解释 工作区 operating area 工作区用转速和转矩组成的二维平面坐标表示(见下图)。
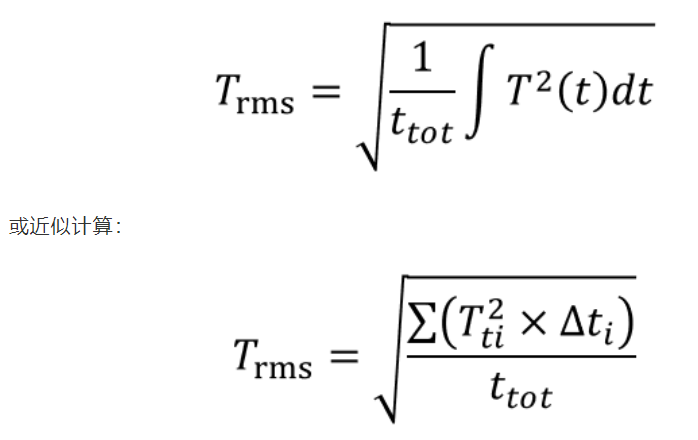
图中: 2TN—2倍额定转矩(峰值堵转转矩); TN—额定转矩; Tnmax—最大转速下的最大转矩; nTmax—2倍额定转矩下的最大转速; nN—额定转速; nmax—电机的最大转速; 电机温升不超过规定值,能长期工作的区域为连续工作区。上图中阴影部分为连续工作区,超出连续工作区,允许电机短时过载运行的区域为断续工作区。 直流母线电压 DC bus voltage 交流伺服驱动器逆变器输入端的直流电压(即电源电压48V或24V); 额定功率 rated power 在连续工作区内,电机所输出的最大功率。 额定转速 rated speed 在连续工作区内,电机额定功率点的转速。 额定转矩 rated torque 电机在额定功率和额定转速下的输出扭矩。 转矩常数 torque constant 在规定条件下,电机通入单位线电流时所产生的平均电磁转矩。 反电动势常数 back EMF constant 在规定条件下,电机电枢绕组开路时,单位角速度在电枢绕组中所产生的线感应电动势。对方波驱动电机反电动势为峰值,对正弦波驱动电机反电动势为有效值。 理想情况下,当采用国际单位时,转矩常数Kt和反电动势常数Ke有如下关系: 对方波驱动电机,Kt=Ke; 对正弦波驱动电机,Kt=√3Ke; 静摩擦力矩 static friction torque 电机绕组开路时,使转子在任意位置开始转动需克服的阻力矩。 电机热阻 thermal resistance of motor 从电机内的热源(绕组、铁心等)到冷却介质之间对热流的阻抗。 电感 inductance 电机两相线间的电感。 直轴电感 inductance of d-axis(direct axis) 当定子旋转磁场的轴线与转子直轴重合时定子所表现的电感。 交轴电感 inductance of q-axis(quadrature axis) 当定子旋转磁场的轴线与转子交轴重合时定子所表现的电感。 电气时间常数 electrical time constant 在阶跃输入电压和规定条件下,堵转电机使绕组电流达到其最终值的63.2%所需时间。 热时间常数 thermal time constant 在恒定功耗和规定条件下,电机绕组温升达到稳定值的63.2%所需时间。 最高允许转速 maximum permitted speed 在保证电气绝缘介电强度和机械强度条件下,电机最大设计转速。 等效转矩 r.m.s torque 非恒转矩应用中,一个完整工作循环中转矩的均方根值,其计算如下:
式中: Trms ----------等效转矩; T(t)------------转矩对时间t的函数 Tti-------------Δti内的转矩值 Δti-------------转矩Tti的持续时间 Ttot------------一个完整工作循环的时间 |