大部分电机在单纯的空载情况下可以跑出极好的功能特性,而一旦上机带载运行时表现出的“性能”却差强人意,主要是因为伺服电机在受到来自机械传动系统反作用力扰动时无法作出合理的响应而造成的。
当伺服电机接入设备机械系统获得的反馈偏差(速度偏差、位置偏差、扭矩偏差等等.......)常常是含杂很多扰动的,如:机械谐振、响应迟滞、传动间隙、机械连接方式...等等,伺服电机需要能够将这些不同类型的偏差和扰动区分开来,有针对性的对各种不同类型的运动反馈做出相应的合适的响应,这样才能够帮助设备达到所需的性能。
所以几乎所有的伺服系统,都需要在较高的惯量比、高动态性能的预期及柔性机械联接这几个方面相互平衡、折中、妥协,而在任何系统中,以上这三点都是无法同时做到的。
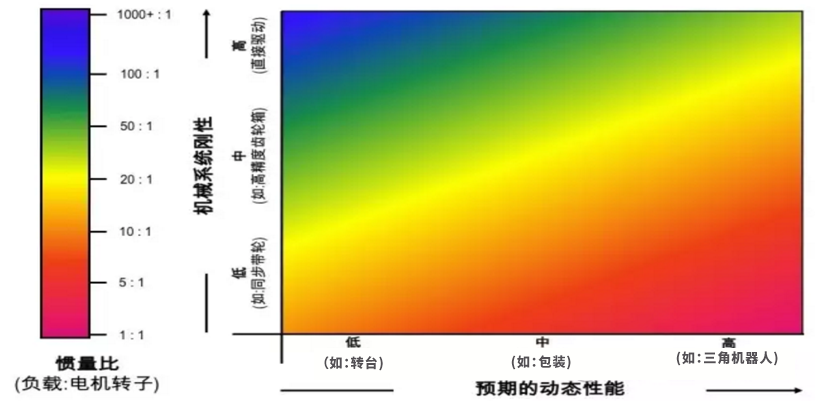
例如要让一个惯量比达到100:1或者更高的系统运转起来,如果系统刚性不佳,此时就需要降低系统响应频率(即增益值),即在性能上妥协;或者我们仍然需要有较高的动态特性,那么就不能允许在电机和负载之间有任何间隙和柔性的联接,上图所示为惯量比与系统刚性和动态性能之间的关系。
合适的惯量比主要取决于运动曲线有多么“激进”以及机械传动有多“硬”,不同的动态特性预期和传动刚性的差异,决定了特定运控系统所“适合”的惯量比。
一些速度较慢或者基本保持恒速运行的应用,如分度转台等,对惯量比要求并不苛刻,基本不要求个位数的惯量比,如果采用较好的刚性机械传动(如直接驱动电机),惯量比达到几百甚至上千有时也是可以接受的。
但对于那些高动态、高精度应用,比如:印刷的套准同步、三角机器人的高速抓取等,即使采用极佳的刚性传动,也不敢使用较大的惯量比(有时 10 都已经很大了);而如果传动刚性不足,那么可能 1:1 的惯量比都大了。
正如惯量比与系统刚性和动态性能之间的关系图中所示,基于不同的动态和精度性能,根据不同的传动机构类型所带来系统刚性差异,可能的惯量比匹配范围还是很大的,是需要在实际具体的运控应用中,区别对待,具体情况,具体分析的。
发布日期:2022-08-31 浏览次数:407
<option id='R8Erh'></option><select id='HDFhm'><span id='2sMiE'><form id='xIqR0'></form></span><dd id='24109'></dd></select><dt id='4zn8V'></dt><style id='ipIvK'><big id='12cBt'><i id='ZannZ'></i><tbody id='S9xgL'></tbody></big></style><abbr id='iLkLP'></abbr>