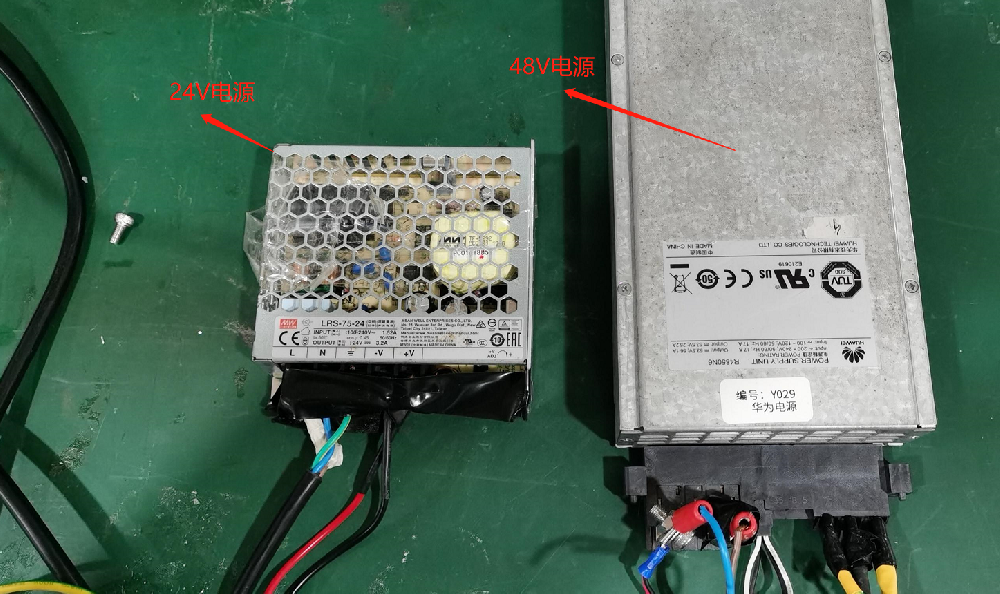
1、前期准备 一台40伺服电机、电机供电电源(48V电源)、抱闸供电电源(24V电源)、一台专有上位机NimotionStudio软件的电脑。
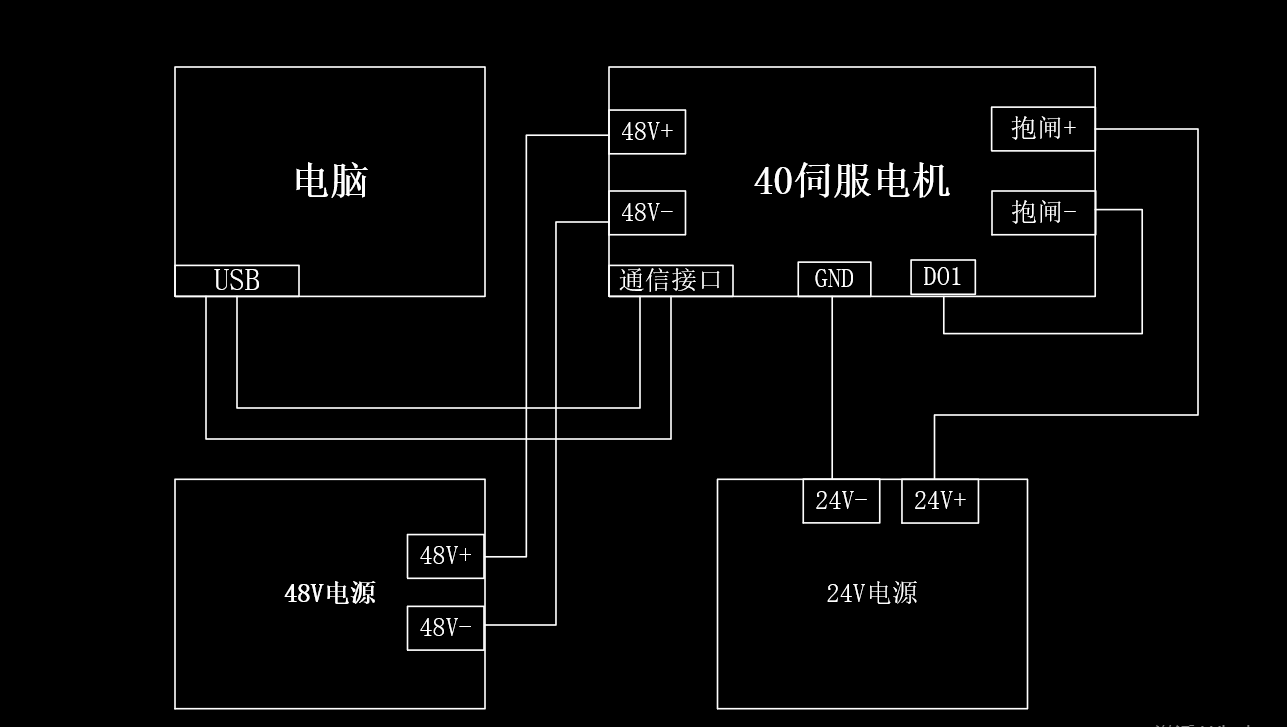
2、系统接线 接线主要分为一下几部分电源给电机供电部分,电机与电脑上位机连接部分,以及抱闸控制部分,如下图所示:
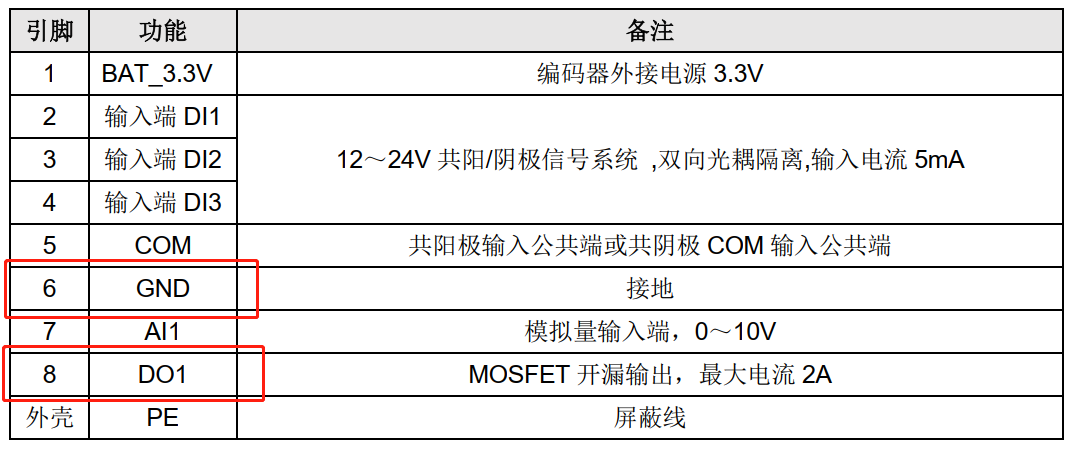
I/O接口各线序定义如下:
硬件连接好了,想要实现通过I/O口来控制抱闸,还需要一点小配置,也就是软件的设置,缺一不可! 3、参数配置
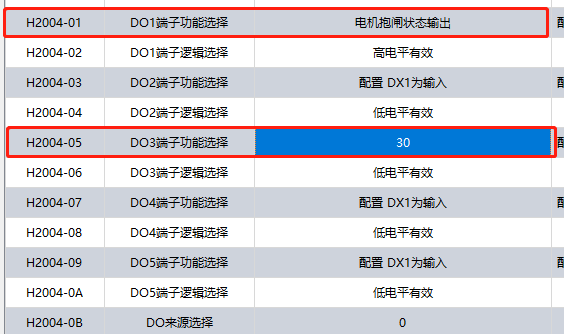
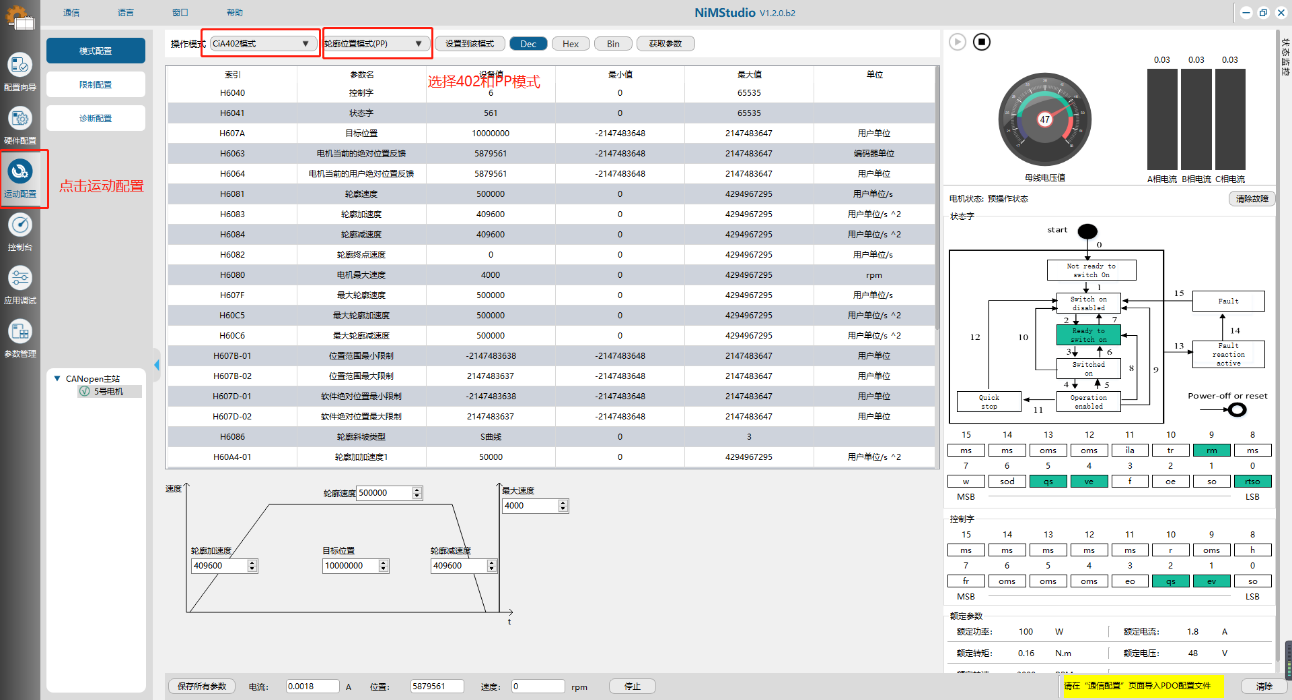
抱闸输出控制可通过对象字典 2004h:05h进行启用 ,抱闸输出通过对象字典 2004h:05h进行启用 。 4、实操演练 1. 配置电机运行模式为PP模式
2. 配置参数
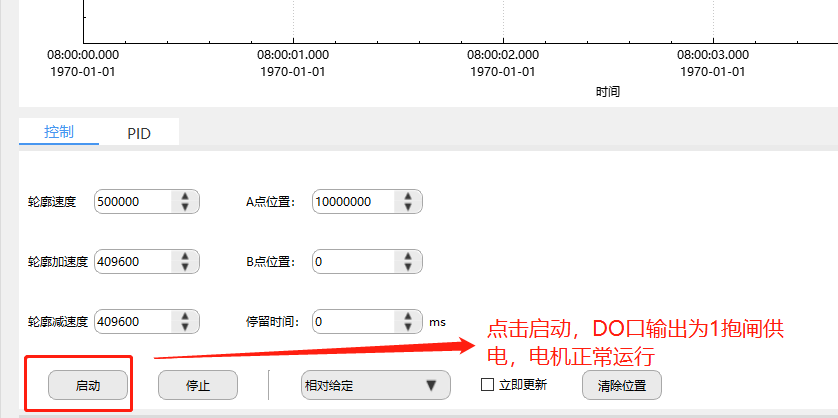
3. 运行过程: 电机点击启动,DO口开漏输出为1,与抱闸供电构成回路,电机正常运行。这样通过DO口控制抱闸供电的功能就实现了。
4. 点击停止,DO口开漏输出为0.抱闸不供电,电机锁轴。
这样通过DO口控制抱闸供电的功能就实现了,不过这方式,应用在水平方向的运动没有问题,但是不适用于垂直方向的运动,垂直方向的运动还需要配合重力识别的功能才可以。 |