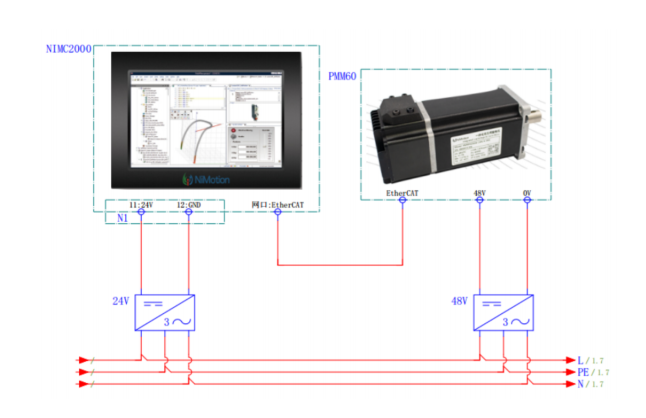
本教程仅适用于九游AG服务NIMC2000系列控制器、PMM系列一体化伺服电 机CANopen通信下CODESYS软件操作使用。 一、系统构成
二、电路配线
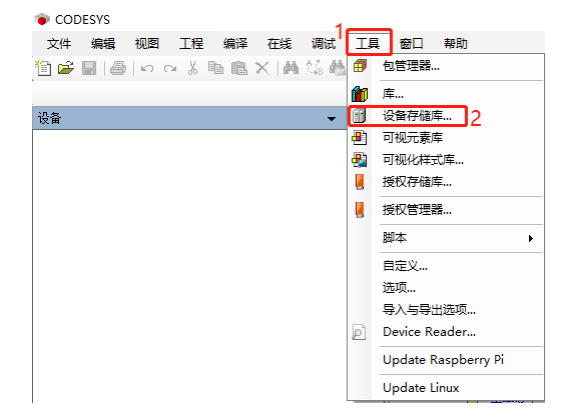
三、安装设备描述文件 1、首先安装控制器描述文件,打开CODESYS软件,点击工具。 2、点击设备存储库。
3、在弹出的界面中,点击安装。
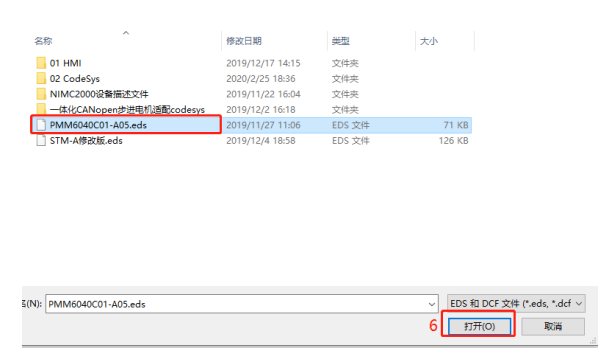
4、选择控制器描述文件,点击打开。则设备描述文件安装完成。
5、继续安装伺服电机描述文件,点击安装。
6、选择电机描述文件,点击打开。则电机描述文件安装完成。
四、新建工程 1、点击文件。 2、点击新建工程
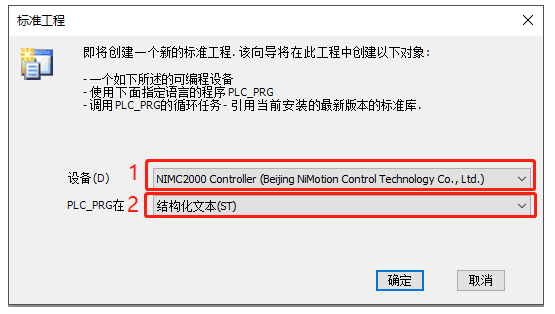
3、选择标准工程,给工程命名并设置工程存储路径,点击确定。
4、设备选择NIMC2000。 5、然后选择使用的PLC语言,点击确定。
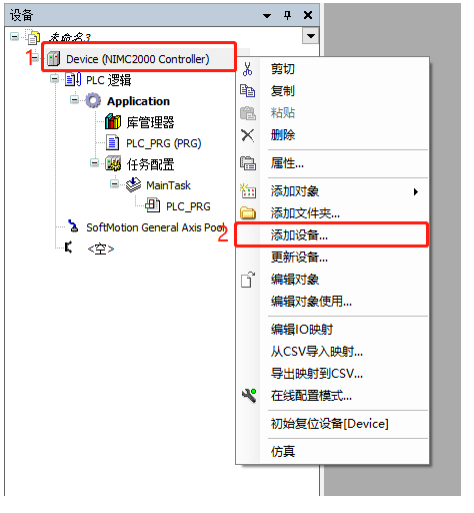
五、工程组态 1、右键点击Device。 2、点击添加设备。
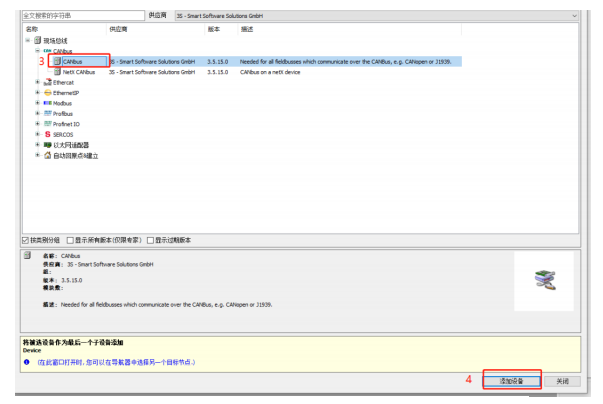
3、选择CANbus。 4、点击添加设备
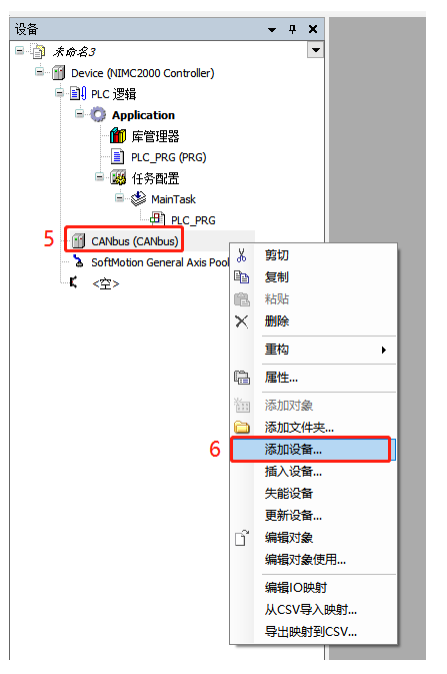
5、鼠标右键点击CANbus。 6、点击添加设备。
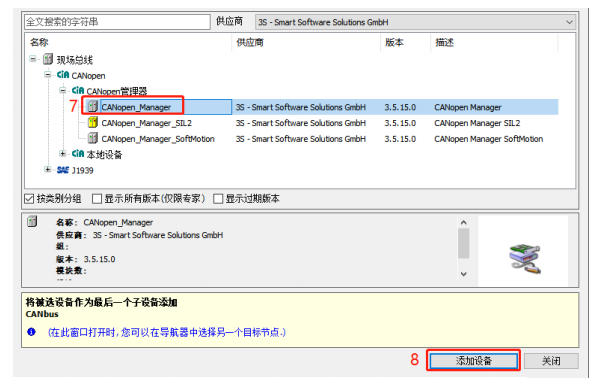
7、选择CANopen_Manager。 8、点击添加设备
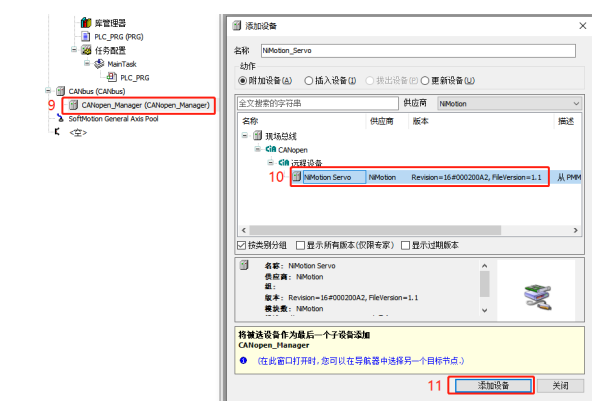
9、点击CANopen_Manager。 10、选择NiMotion Servo。 11、点击添加设备。
12、右键点击NiMotion Servo。 13、点击添加SoftMotion CiA402轴。
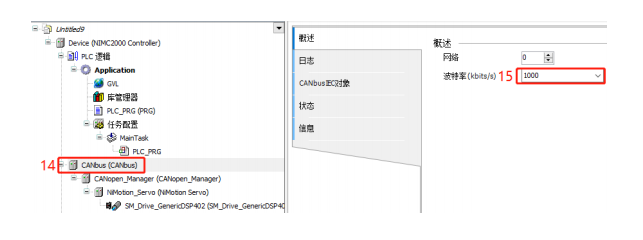
14、打开CANbus设置界面。 15、将波特率改为1000。伺服组态设置完成。
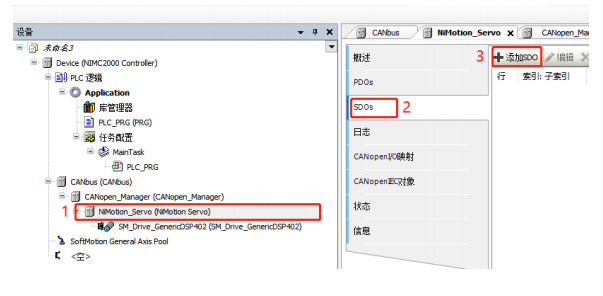
六、初始化参数设置 1、双击NiMotion_Servo。 2、打开SDOs界面。 3、点击添加SDO。
4、选择Max torque 5、点击确定。
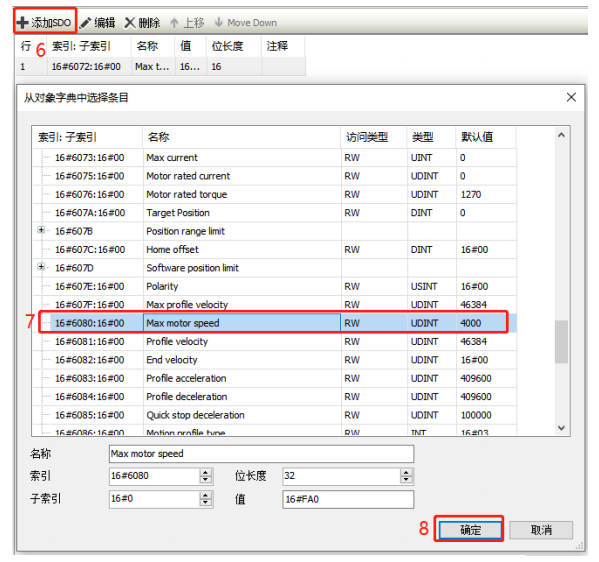
6、再次点击添加SDO。 7、选择Max motor speed 8、点击确定。
9、设置完成如图所示。
10、打开SM_Drive_GenericDSP402 设置页。 11、打开SoftMotion驱动:缩放/映射。 12、把电机旋转一圈,编码器增量设置为1000。
七、程序编写 1、打开PLC_PRG。 2、鼠标点击变量声明区空白处,按F2键调出输入助手。 3、点击文本搜索。 4、输入使能功能块关键字:power。 5、选择功能块SMC_Basic.MC_Power。 6、点击确定。
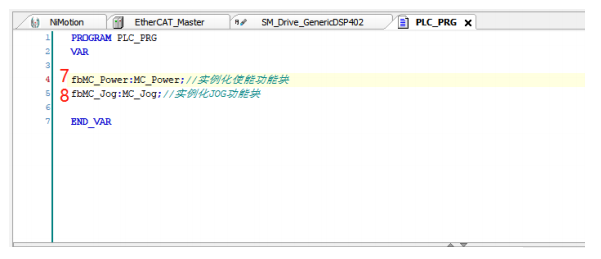
7、实例化MC_Power功能块。 8、按照步骤1-7所示的方法,实例化MC_Jog功能块,如下图所示。
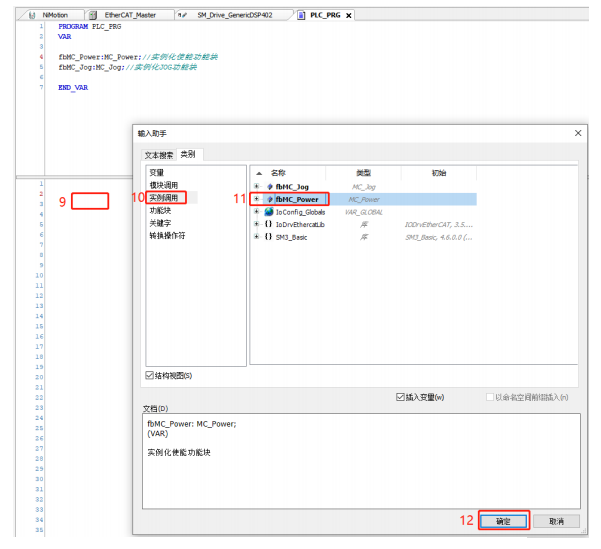
9、点击程序编辑区,按F2 键,调出输入助手。 10、点击实例调用 11、选择实例fbMC_Power。 12、点击确定。
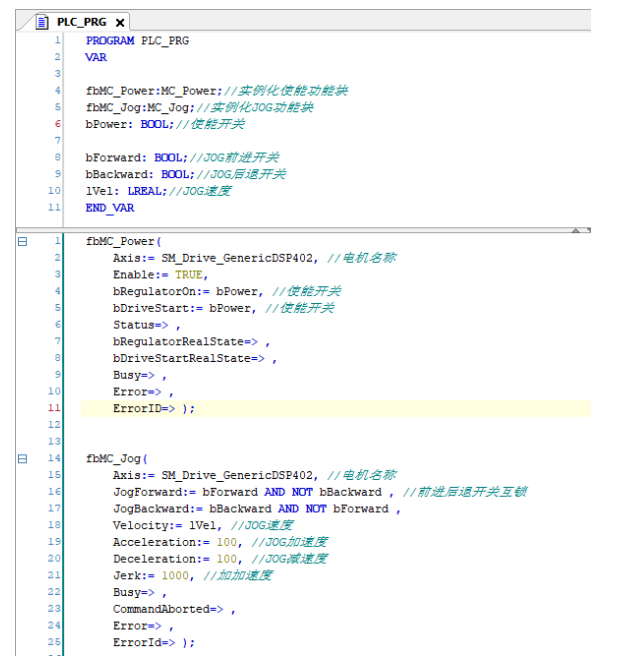
13、在调用的功能块中,填入相关变量,如下图所示。
14、按照步骤9-13的方法,调用JOG功能块,并填入相关变量。程序如图所示。
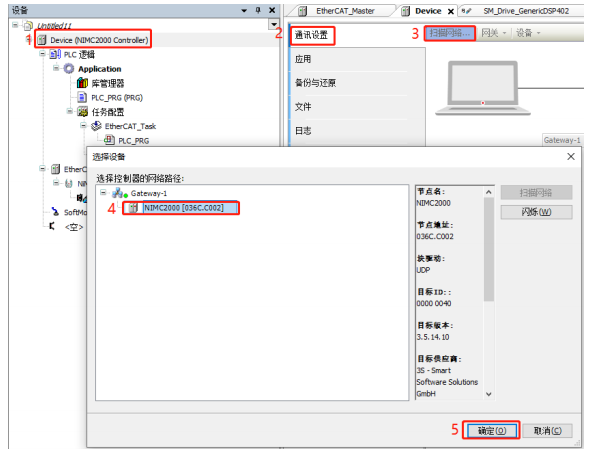
八、程序下载和设备登录 1、打开Device界面。 2、打开通讯设置。 3、点击扫描网络。 4、选择NIMC2000。 5、点击确定。
6、点击如图所示图标,登录到设备,同时程序会自动下载至控制器。
7、登录完成后,点击如图所示图标,启动控制器。
8、启动完成后,如图所示。
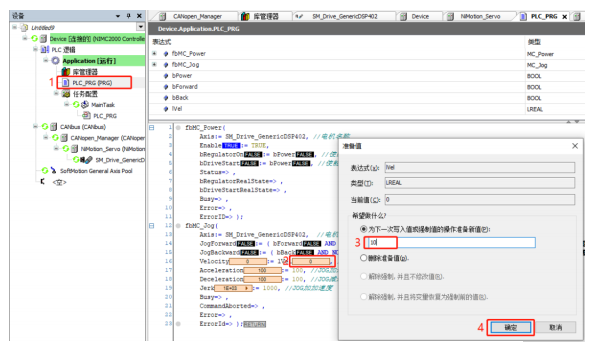
九、程序调试 1、打开PLC_PRG窗口。 2、更改JOG设定速度,双击lVel变量。 3、在弹出的窗口中,输入JOG速度的准备值。 4、点击确定。 5、按Ctrl+F7 组合键,将准备值写入lVel变量。
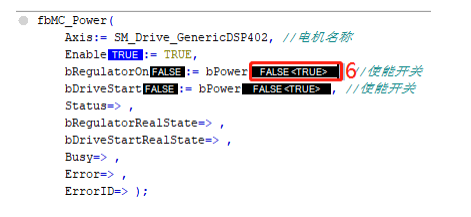
6、双击bPower状态,使准备值变为TRUE 7、按Ctrl+F7 组合键,把准备值TRUE写入bPower,则电机使能。
8、按照步骤6- 7所示的方法,操作bForward或bBack变量,则可实现伺服电机的正反转运动。
|