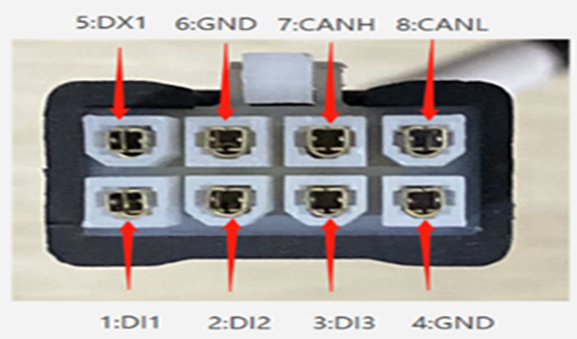
本文仅适用于九游AG服务PMM系列一体化伺服电机出现的常见问题。如您的伺服电机是其他型号的请谨慎操作。常见问题如下: 1、编码器值清零或设置原点如何操作? 设置过程: H2003-03=33(设置原点),H2003-04=0(低电平有效),参数保存(重新上电参数仍在); 过程报文: 601 2B 03 20 03 21 00 00 00 601 2B 03 20 02 00 00 00 00 601 23 10 10 01 73 61 76 65 DI1给低电平,当前位置即可清零; ②虚拟端子清零 设置过程: H2017-01=33(设置零点),H2017-02=0设置高电平有效;参数保存(重新上电参数仍在),H2031-01先写1再写0,位置即可清零; 对应报文: 601 2B 17 20 01 21 00 00 00 601 2B 17 20 02 00 00 00 00 601 23 10 10 01 73 61 76 65 601 2B 31 20 01 01 00 00 00 601 2B 31 20 01 00 00 00 00 参数保存后,再次清零只需设置红色字体或发送对应报文清零; 2、如何清除历史报警? ①实体端子 设置过程: H2003-03=38(清除故障历史),H2003-04=0(低电平有效),参数保存(重新上电参数仍在); 对应报文: 601 2B 03 20 03 26 00 00 00 601 2B 03 20 04 00 00 00 00 601 23 10 10 01 73 61 76 65 DI1给低电平,当前历史报警信息即可清除; ②虚拟端子 设置过程: H2017-01=38(清除故障历史),2017-02设置高电平有效,参数保存(重新上电参数仍在),H2031-01先写1再写0; 对应报文: 601 2B 17 20 01 26 00 00 00 601 2B 17 20 02 00 00 00 00 601 23 10 10 01 73 61 76 65 601 2B 31 20 01 01 00 00 00 601 2B 31 20 01 00 00 00 00 参数保存后,再次清除故障历史只需设置红色字体或发对应报文即可; 3、如何清除当前报警? ①实体端子 设置过程: H2003-03=2(报警复位),H2003-04=0(低电平有效),参数保存(重新上电参数仍在); 对应报文: 601 2B 03 20 03 26 00 00 00 601 2B 03 20 04 00 00 00 00 601 23 10 10 01 73 61 76 65 DI1给低电平,当前报警即可清除; ②虚拟端子 设置过程: H2017-01=2(报警复位),2017-02设置高电平有效,参数保存(重新上电参数仍在),H2031-01先写1再写0; 对应报文: 601 2B 17 20 01 02 00 00 00 601 2B 17 20 02 00 00 00 00 601 23 10 10 01 73 61 76 65 601 2B 31 20 01 01 00 00 00 601 2B 31 20 01 00 00 00 00 参数保存后,再次清除故障只需设置红色字体或发对应报文即可; 4、如何保存当前参数? 在H1010-01写0x65766173;H1010-01返回值如果是1则保存成功,返回值为其它值时,检查电机是否处于使能或母线电压低于额定电压80%的状态; 对应报文:601 23 10 10 01 73 61 76 65 5、电机电源低于24v时出现欠压报警如何调整? H2001-10直流母线电压欠压点(默认24V),设置实际所需电压;如实际电源电压20v,可将H2001-10设置为18v; 对应报文:601 2B 01 20 10 12 00 00 00 6、电源电压使用24v供电时参数无法设置保存? 电机具有欠压保护功能,当实际母线电压低于额定电压(H2000-07默认48v)的80%时,参数将无法设置保存;此时需要将额定电压(H2000-07)值修改为24v、欠压报警值(H2001-10)修改为20v(只需低于母线电压值)即可正常保存参数; 对应报文:601 2B 00 20 07 18 00 00 00,601 2B 01 20 10 14 00 00 00 7、报警信息在哪个参数里面查看? 当前报警信息可查看H603F,当前设备报警数量可查看H1003-00,历史报警可查看H1003-01—H1003-10; 8、如何恢复为出厂参数? 在H1011-01写0x64616F6C; 对应报文:601 23 11 10 01 6C 6F 61 64 9、电机IO线端子对应定义?
10、刹车电机多少伏供电? 直流24v供电; 11、canopen通讯线航插头及对应的散线线序是什么?
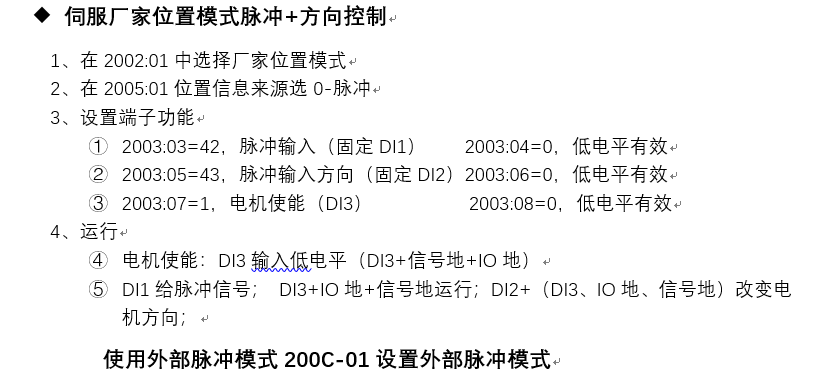
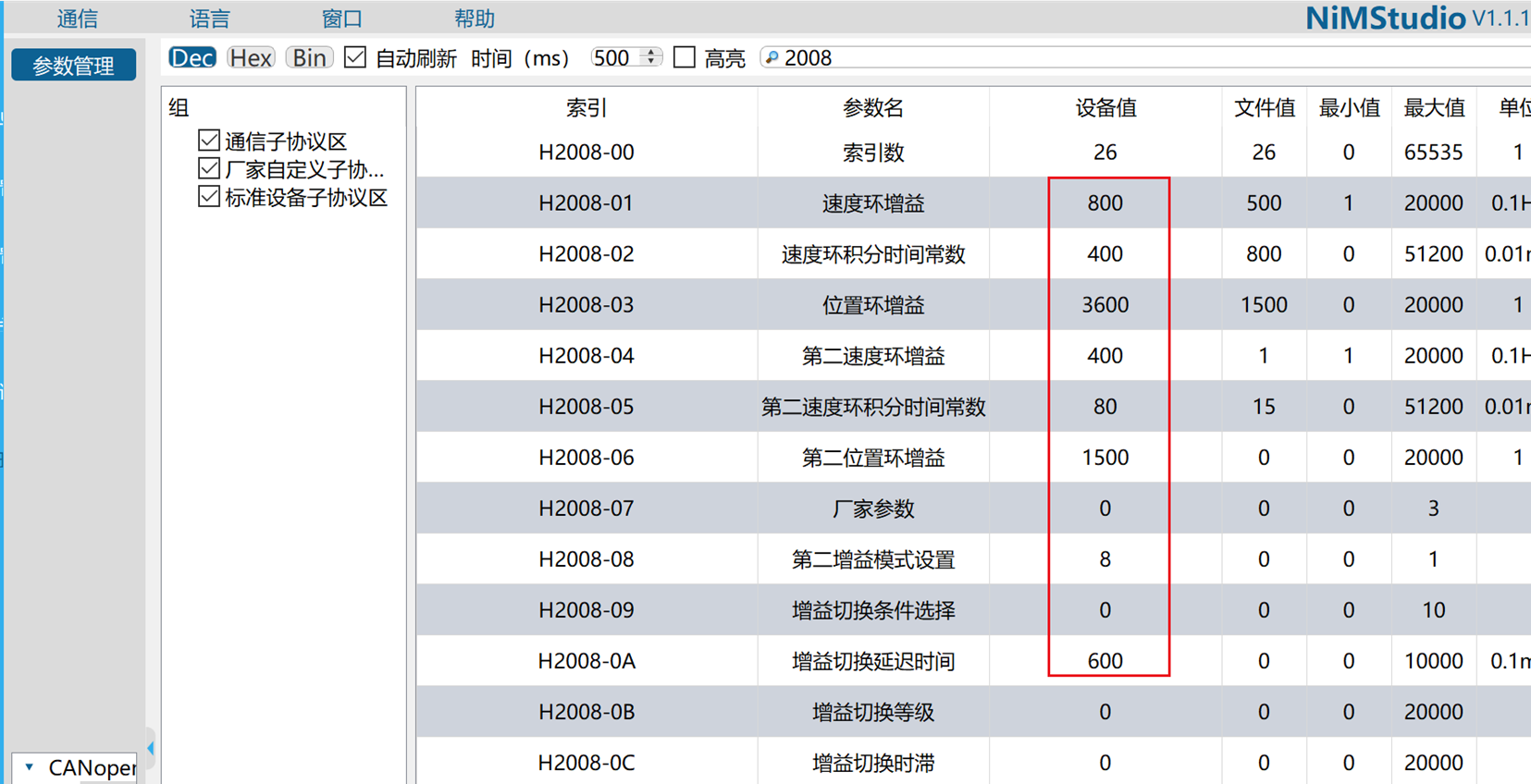
12、电机一圈多少脉冲? 电机一圈脉冲为10000; 13、电机如何暂停并使能? 控制字的第8位置1;因为不同的模式控制字不同,所以对应暂停的指令不同;如PV模式下:控制字给10F; 14、电机运行到65536停止且无报警的原因? 受软限位607D-01/02限制,设大此参数; 15、当前速度是哪个参数? 读H6069,用户单位/s;H603C ,rpm; 16、当前位置读哪个参数? 读H6063、H6064 17、电机的PID如何调? 速度环增益H2008-01默认值500,适当增加此参数; 速度环积分时间常数H2008-02默认值800,适当减小此参数; 位置环增益H2008-03默认值1500,适当增加此参数; 运动过程中调节参数,可根据速度/位置波动范围进行调节; 18、外接制动电阻线如何接? 外接制动电阻的两根线,其中一根接到电机的制动电阻线上,另一根接到电机48V正极上; 19、电机报警时DO是否可以正常控制动作? 报警,分两种,一个是触发故障报警位,一种是不触发故障报警位的(不需要清清除故障报警的);上电、正常通讯情况下,两种报警状态下都能控制动作,不考虑状态机; 20、使用NIMstudio,控制电机在单轴控制台里出现导入PDO配置文件提示?
如图,在硬件配置中点击“从文件中恢复PDO参数”,选择ConfigFile后,对应通讯方式选择配置文件; 电机每次断电后再使用,需要重新再恢复配置,不改变PDO的话不恢复文件也不影响电机使用; 21、状态字读哪个参数? 状态字读H6041; 22、输入输出口的状态读哪个参数? 200B-05输入DI信号监视,200B-06输出DO信号监视; 23、电机轴地址修改需要设置哪个参数? 修改驱动器轴地址:H200C-02; 24、外接限位开关停机的机制是什么样? 外接限位开关时,正限位开关、负限位开关的正负是相对于零点的,在零点的正方向接正限位开关生效,在零点的负方向接负限位开关生效; 25、原点回归超时原因及回归时间设置? 原点回归时间限制:H2005-1C; 原因:原点回归过程中会启动原点回归时间计时,在时间到达而相应的回归动作未完成时,驱动器会有超时报警错误; 解决方法:①增大H2005-1C参数值;②在H200E-0A里写0x06008610并保存; 26、参数设置错误报警? 参数设置错误一般为实体端子/虚拟端子设置重复,可以检测H2003、H2017功能十分重复设置; 27、如何开启电机的两倍过载功能? 最大转矩H6072设置2000,最大电流H6073设置2000; 28、外部脉冲加方向控制电机如何配置?
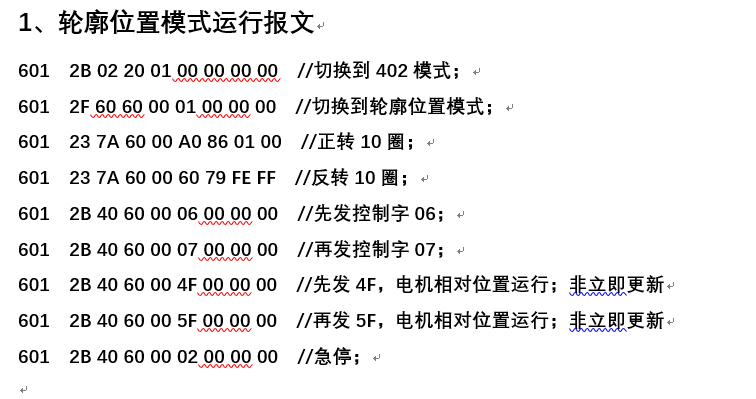
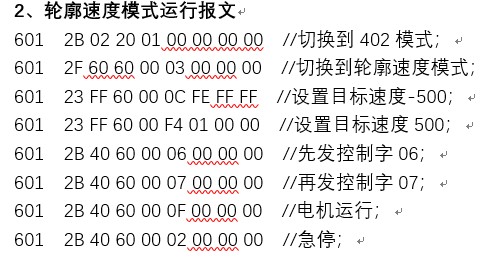
29、常用原点回归方式17/18/19使用配置及接线(NPN型光电开关)? ① 原点回归方式17(负限位开关) 机械原点:负限位开关 模式设置 2002:01=0,选择402模式;6060=0x06,选择原点回归模式 IO端子设置 2003:03=15,反向超程开关;2003:04=0,低电平有效(注:NPN接常闭输出为高电平有效); 回零方式及速度设置 6098=17,负限位开关; 6099:01=10000(用户单位/s),找限位开关速度; 6099:02=1000(用户单位/s),找原点信号速度; 609A=200000(用户单位/s*2); 硬件接线 NPN光电开关(正极、负极、常开输出、常闭输出); 正极+24v,负极+IO口地+24v电源地,常开输出+IO口DI0; 运行 6040h=0x06→0x07→0x0F→0x1F 电机按照原点回归方式17开始回零; 注:NPN光电开关需设置上拉使能;2003-15默认7 ② 原点回归18(正限位开关) 机械原点:正限位开关 模式设置 2002:01=0,选择402模式;6060=0x06,选择原点回归模式 IO端子设置 2003:03=14,正向超程开关;2003:04=0,低电平有效(注:NPN接常闭输出为高电平有效); 回零方式及速度设置 6098=18,正限位开关; 6099:01=10000(用户单位/s),找限位开关速度; 6099:02=1000(用户单位/s),找原点信号速度; 609A=200000(用户单位/s*2); 硬件接线 NPN光电开关(正极、负极、常开输出、常闭输出); 正极+24v,负极+IO口地+24v电源地,常开输出+IO口DI0; 运行 6040h=0x06→0x07→0x0F→0x1F 电机按照原点回归方式18开始回零; 注:NPN光电开关需设置上拉使能;2003-15默认7 ③ 原点回归方式19(原点开关) 机械原点:原点开关 模式设置 2002:01=0,选择402模式;6060=0x06,选择原点回归模式 IO端子设置 2003:03=31,原点开关;2003:04=0,低电平有效(注:NPN接常闭输出为高电平有效); 回零方式及速度设置 6098=19,原点开关; 6099:01=10000(用户单位/s),找原点开关速度; 6099:02=1000(用户单位/s),找原点信号速度; 609A=200000(用户单位/s*2); 硬件接线 NPN光电开关(正极、负极、常开输出、常闭输出); 正极+24v,负极+IO口地+24v电源地,常开输出+IO口DI0; 运行 6040h=0x06→0x07→0x0F→0x1F 电机按照原点回归方式19开始回零; 注:NPN光电开关需设置上拉使能;2003-15默认7 30、常用原点回归方式17/18/19使用配置及接线(PNP型光电开关)? ① 原点回归方式17(负限位开关) 机械原点:负限位开关 模式设置 2002:01=0,选择402模式;6060=0x06,选择原点回归模式 IO端子设置 2003:03=15,反向超程开关;2003:04=0,低电平有效(注:PNP接常闭输出为高电平有效); 回零方式及速度设置 6098=17,负限位开关; 6099:01=10000(用户单位/s),找限位开关速度; 6099:02=1000(用户单位/s),找原点信号速度; 609A=200000(用户单位/s*2); 硬件接线 PNP光电开关(正极、负极、常开输出、常闭输出); 正极+24v,负极+IO口地+24v电源地,常开输出+IO口DI0; 运行 6040h=0x06→0x07→0x0F→0x1F 电机按照原点回归方式17开始回零; 注:PNP光电开关需下拉对应设置;2003-15=0 ② 原点回归18(正限位开关) 机械原点:正限位开关 模式设置 2002:01=0,选择402模式;6060=0x06,选择原点回归模式 IO端子设置 2003:03=14,正向超程开关;2003:04=0,低电平有效(注:PNP接常闭输出为高电平有效); 回零方式及速度设置 6098=18,正限位开关; 6099:01=10000(用户单位/s),找限位开关速度; 6099:02=1000(用户单位/s),找原点信号速度; 609A=200000(用户单位/s*2); 硬件接线 PNP光电开关(正极、负极、常开输出、常闭输出); 正极+24v,负极+IO口地+24v电源地,常开输出+IO口DI0; 运行 6040h=0x06→0x07→0x0F→0x1F 电机按照原点回归方式18开始回零; 注:PNP光电开关需下拉对应设置;2003-15=0 ③ 原点回归方式19(原点开关) 机械原点:原点开关 模式设置 2002:01=0,选择402模式;6060=0x06,选择原点回归模式 IO端子设置 2003:03=31,原点开关;2003:04=0,低电平有效(注:PNP接常闭输出为高电平有效); 回零方式及速度设置 6098=19,原点开关; 6099:01=10000(用户单位/s),找原点开关速度; 6099:02=1000(用户单位/s),找原点信号速度; 609A=200000(用户单位/s*2); 硬件接线 PNP光电开关(正极、负极、常开输出、常闭输出); 正极+24v,负极+IO口地+24v电源地,常开输出+IO口DI0; 运行 6040h=0x06→0x07→0x0F→0x1F 电机按照原点回归方式19开始回零; 注:PNP光电开关需下拉对应设置;2003-15=0 31、CANOPEN运动报文举例? PP模式下电机首次运行时,控制字需要发6-7-0xxF-0xxF,改变目标位置、多次运行只需要给目标位置,控制字再发xF-xF即可;
PV模式下首次运动时控制字需要给6-7-0xF,改变目标速度运行时,只需要给目标速度、控制字发0xF即可;
32、NiMotion的产品 需要通过软件读取产品的序列号,软件版本号,产品类别? ①如下图位置可看到产品的序列号、软硬件版本号、类别; ②用鼠标在1号电机位置停留2秒钟,也可看到电机软硬件版本号,电机序列号;
33、XML,EDS文件的版本号,如何读取?和电机软件版本对应关系? 如下:
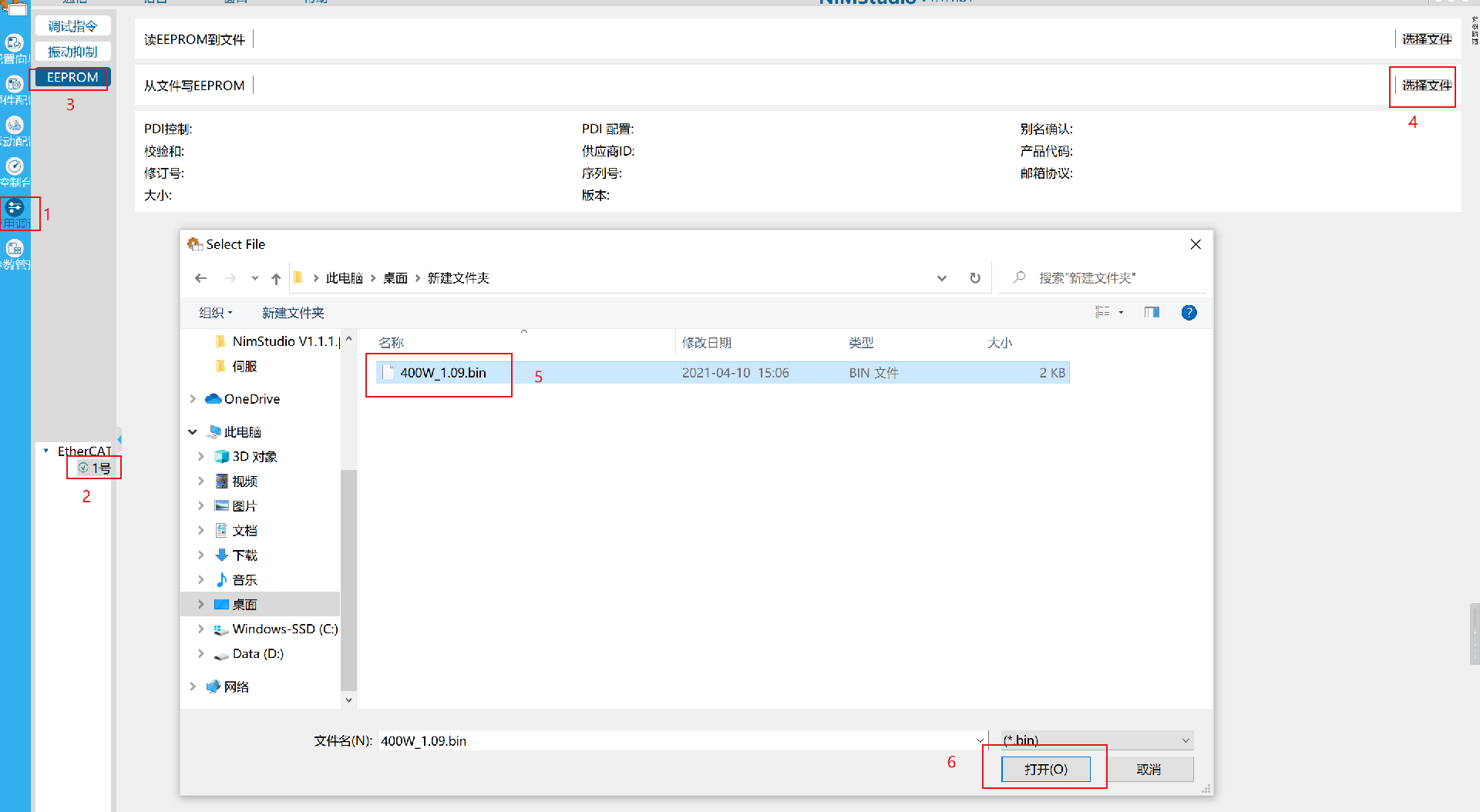
34、XML文件版本不对,会出现什么问题? XML版本与固件版本不对,可能导致控制器无法正常扫描到电机,电机无法启动,解决方恢复正确的bin文件,恢复方法参考34; 35、如何升级电机的XML文件? 下图举例为400w机,不同型号电机选不同文件即可;
36、如何通过NiMotion的高性能一体化步进电机外接PWM信号实现闭环? PWM信号控制后可通过总线读取电机位置、速度等值; 37、如何通过NiMotion的高性能一体化步进电机外接增量编码器? ①外部增量式编码器信号A(固定DI1) ②外部增量式编码器信号B(固定DI2) ③外部增量式编码器信号Z(固定DI3) 可通过总线通信来读取位置、速度等值; 38、没有CANOPEN主站卡也没有带CANOPEN总线的运动控制器,能否用低成本的方式实现CANOPEN通信? 用NiMotion的USB转CAN转换器 +SDK开发包。 39、单个ETHERCAT从站复位指令 在CODESYS中有没有? 用ETCSlaveStacck.SetOpMode(METH) 40、一体化高性能步进电机(-M)位置模式 相对运行停止时震荡如何解决? 可以通过开启多端增益调节,如下图;
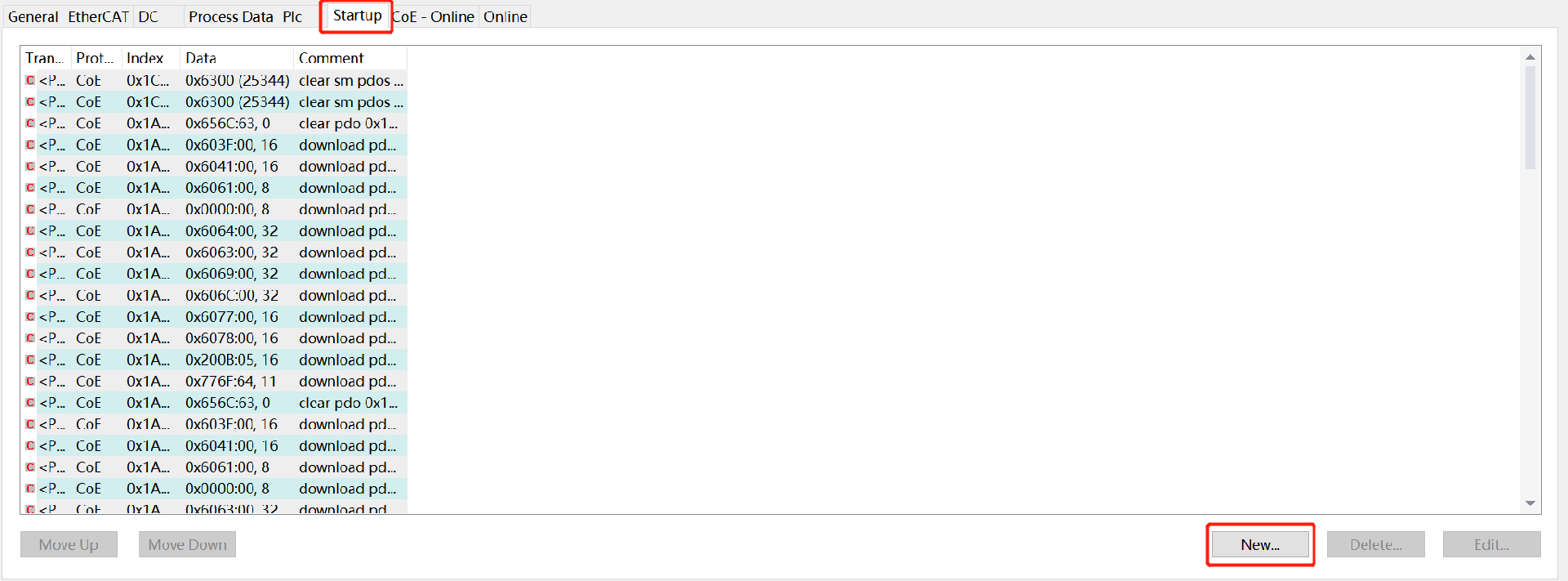
41、控制器DC模式同步周期太短能会出现什么问题? 可能会导致电机运动过程中出现掉OP的现象,需要调整DC时间; 42、Twincat3控制伺服Ethercat通信的电机不在程序种添加最大速度、最大扭矩的方法? 操作方法: ①将最大速度,最大扭矩从PDO分组中删除, ②添加到主站的startup里面,对着两个对象进行初始化赋值
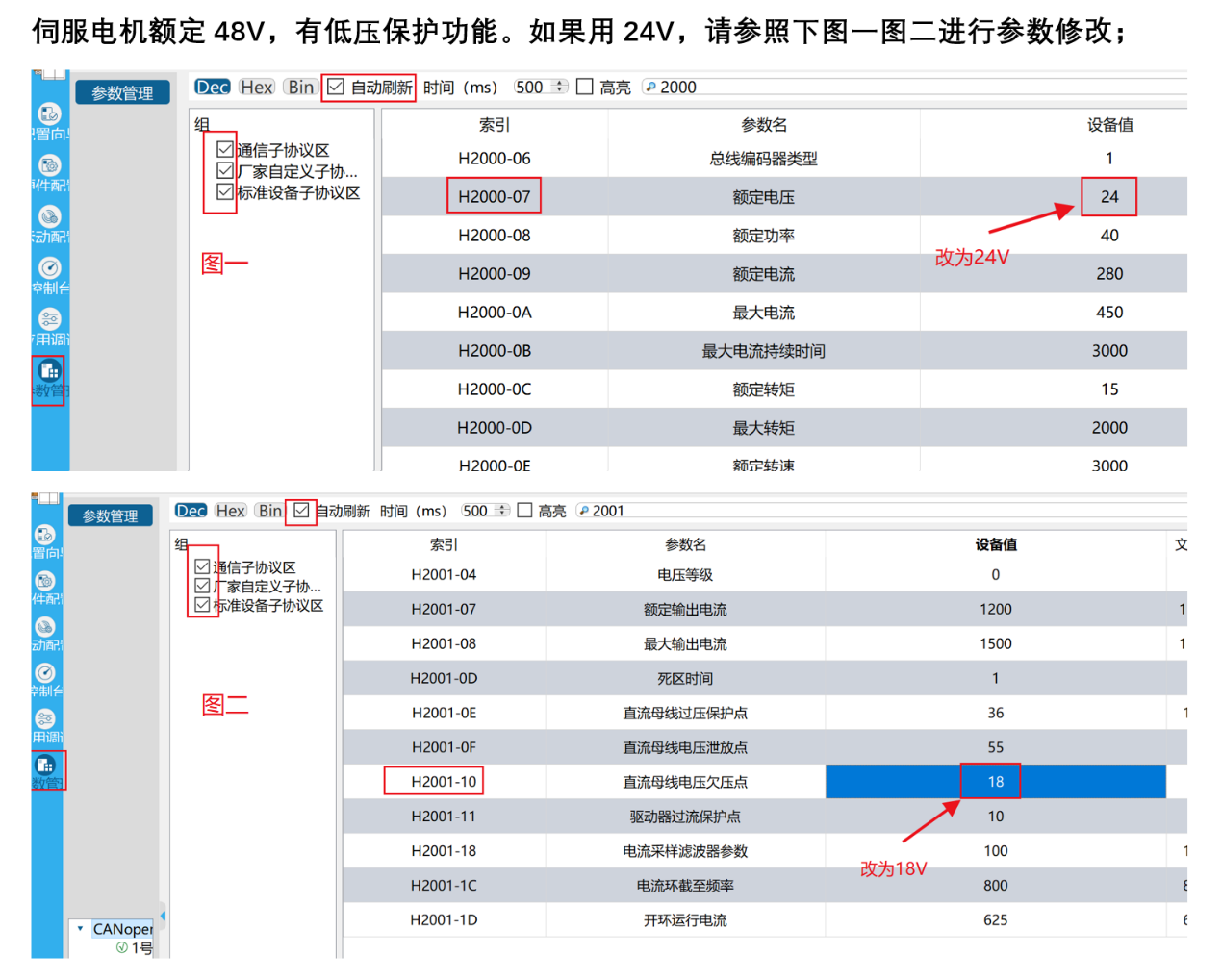
43、伺服电机能否用24v供电及注意事项? 伺服电机额定48v,可以用24v供电,但需要修改额定电压及欠压报警值,如下图;
44、伺服电机如何外接光电限位开关? ①正负限位设置如下图:
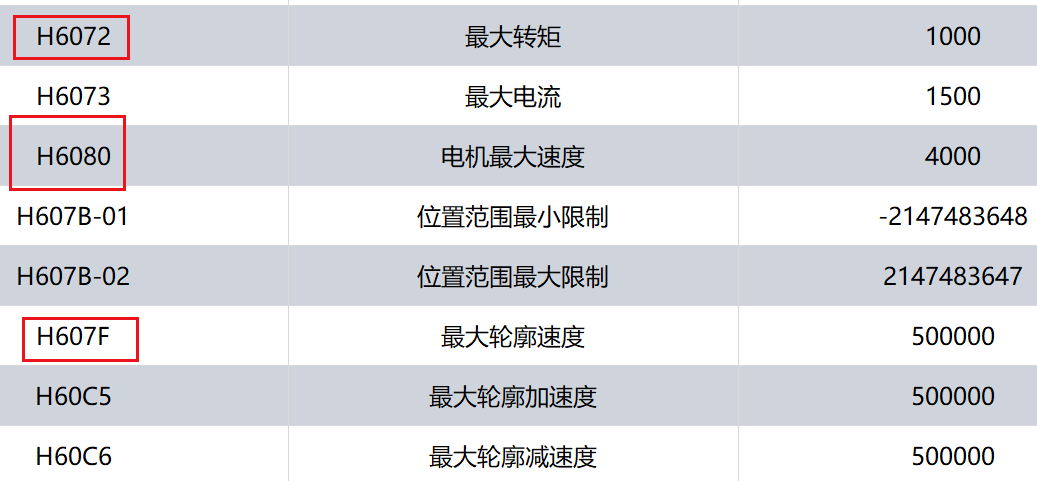
②4线光电开关引线定义: 正极、负极、信号线1(常开)、信号线2(常闭) ③接线(正限位开关): 正、负线接供电电源,信号线1接DI1;(如果用到的是接信号线2,则需要把H2003-04改成高电平有效) 45、电机接限位开关时的DI引脚如何对应? IO引脚没有功能固定,通过IO口接限位开关时首先需要设置引脚功能,根据所需设置的引脚功能,再对应实际设置接线; 如:设置DI1功能为正限位开关、DI2为负限位开关;然后将限位开关的信号线对应接入DI口即可; 46、伺服电机DI口说明书上与上位机软件上的起始顺序不一致如何对应? 说明说上3个DI是DI0-DI1-DI2对应着上位机软件的DI1-DI2-DI3; 47、伺服Ethercat通信的电机用上位机软件连接控制时电机无法正常运行问题可能是? ①上位机软件在恢复PDO的过程中会把相关参数清零,需要检查H6072最大转矩(1000)、H6080最大速度(3000)、H607F最大轮廓速度(500000)值是否正常;
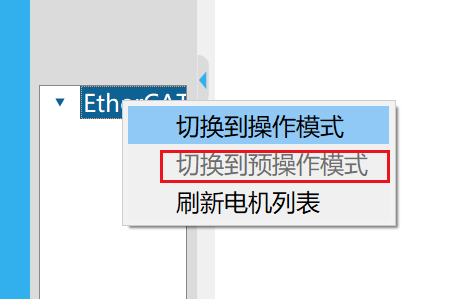
②是否已经切换到操作模式;
48、电机报警参数如何读、对应含义是什么? ①如下图,切换到16进制,在电机参数管理里面输1003,第一个子索引是当前报警的数量,往下是由近到远(时间)发生的报警;
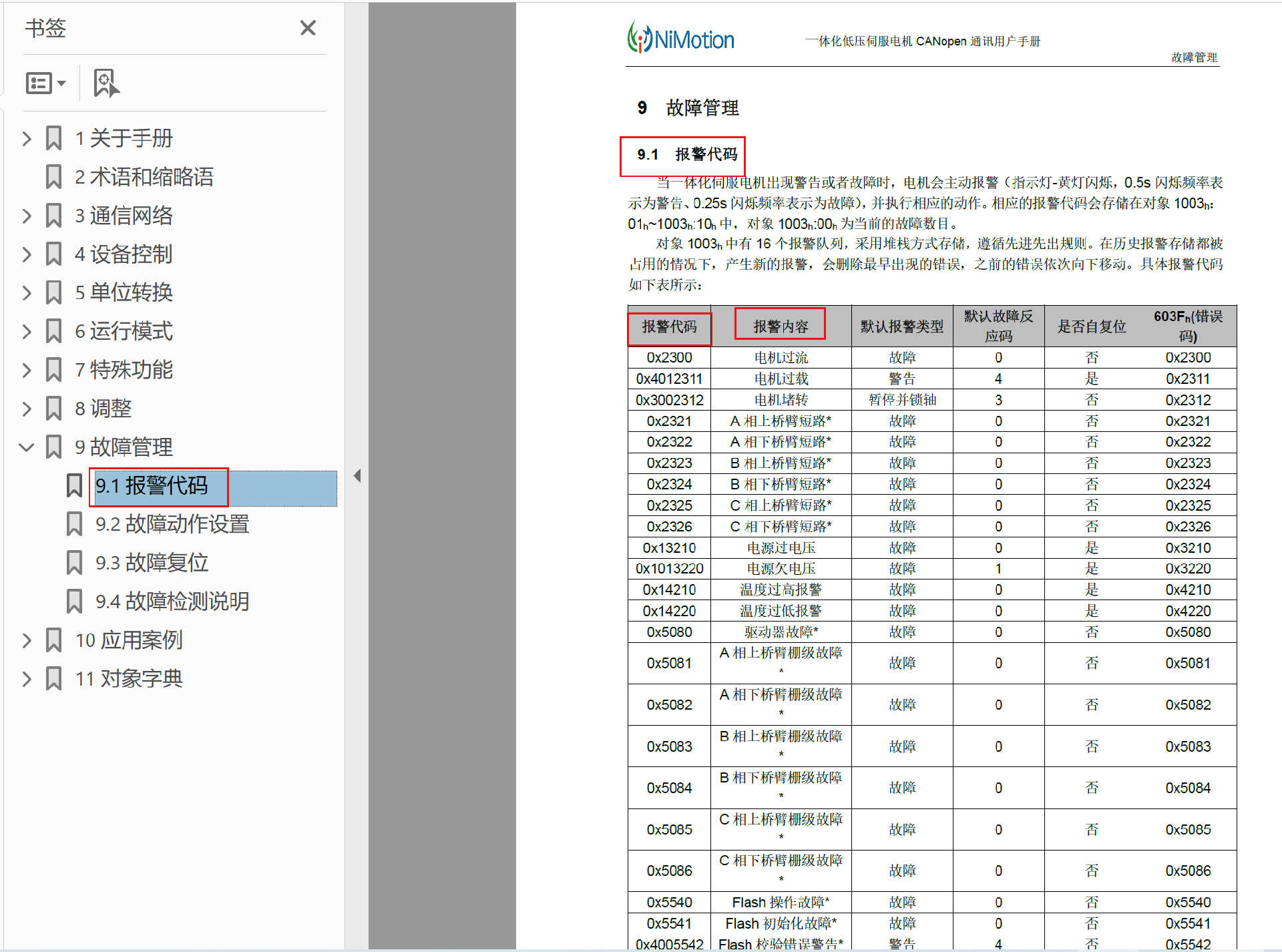
②如下手册对应报警码及含义
49、伺服电机刹车内控(驱动器控制刹车通断)配置及接线? ①参数配置 H2004-05设置30;H2004-06低电平有效;H2002-04设置100; ②电源及刹车线定义 电源线:红(正),黑(GND),蓝(外接制动电阻线); 刹车线:红(24v正)黑(GND); ③接线 电机正负极正常供电; 刹车线正极接24v电源正极,刹车线负极接制动电阻线(蓝); 24V电源GND与电机GND共地; ④启动 电机使能刹车松开,失能刹车闭合; 50、伺服、无刷、高性能电机参数保存成功状态如何判断? 可以通过读取H1010-01,返回值如果是1则保存成功,其他值则不成功;
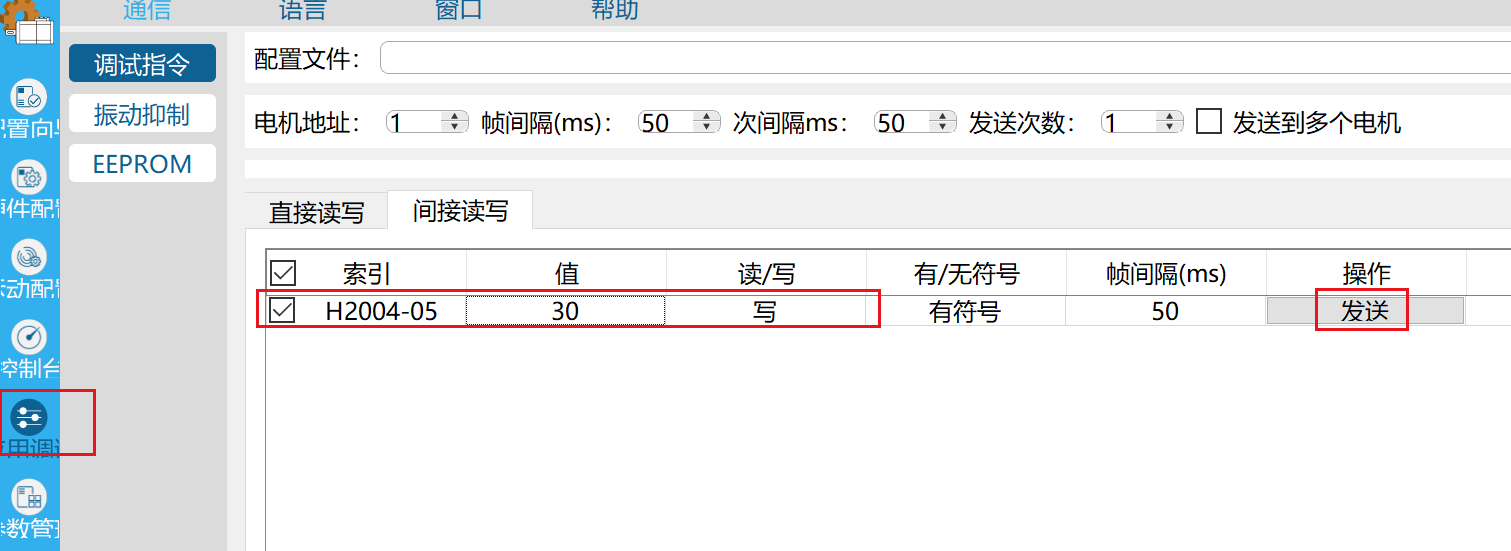
51、上位机软件设置参数时,下拉无对应选项如何解决? 下拉无对应选项可在应用调试界面直接读写或间接读写里面操作,如下图;
|